 AMRセンサ
AMRセンサ
AMR(Anisotropic-Magneto-Resistive)センサは、Si若しくはガラス基板と、その上に形成されたNi,Feなどの強磁性金属を主成分とする合金の薄膜で構成され、パターニングすることにより長手方向に磁壁(磁区と磁区の境界)が揃い、形状異方性を示します。強磁性薄膜金属に電流を流し、磁界Hが電流方向Yに対して垂直方向Xに印加された場合(図1)、磁界の強さに応じて抵抗値が下がります。
抵抗値変化と磁壁、磁化の変化をイメージ的に図2に示します。
①のように外部磁界がない状態では、磁化がお互いに打ち消し合い、外部に磁界が発生しない状態になっています。
②のように、外部磁界が弱いうちは、磁壁が移動して外部磁界の方向と一致する磁区の体積が増えていきます。
③のように、外部磁界が強くなるにつれて、磁区の中で磁化の回転が起きます。
④のように、磁化の方向が外部磁界の方向に向くにつれて、磁壁が減少します。
⑤では、全体が1つの磁区状態(単一磁区の状態)となり飽和します。AMRセンサは、パターンの長手方向に対して垂直な方向に外部磁界が印加された時、その磁界強度に応じて抵抗値が減少します。
この効果を利用したのがAMRセンサです。
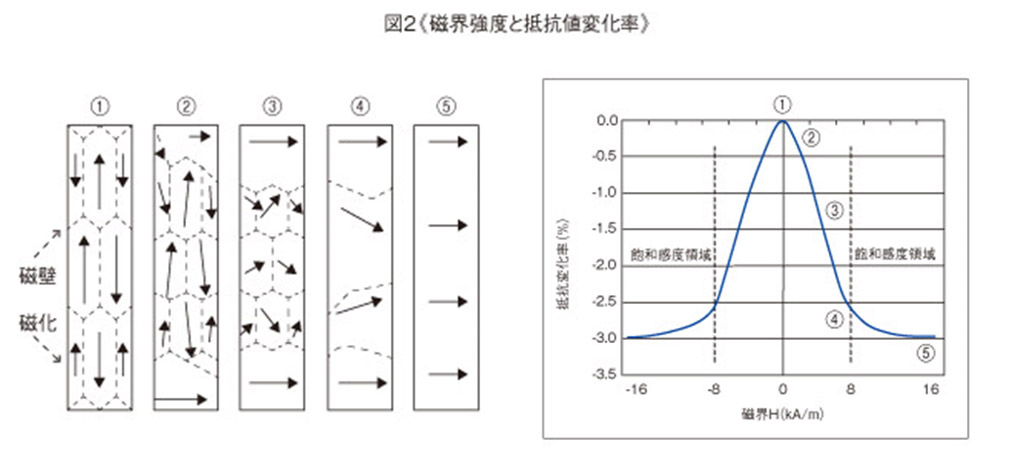
図2のように、磁界強度の変化による抵抗変化率は、約3%となります。抵抗値変化率(ΔR%)が、近似的に
∆R∝H2…(1)
の式で表すことができる領域外を、飽和感度領域と呼び、その領域では、一定の磁界強度以上になると、抵抗値は変化しません。
またf(H)=f(-H)(ゼロ磁界に対して対称)ですから、極(N,S)の判別はできません。
次に図3のように強磁性薄膜金属に電流を流し、抵抗値変化が飽和する磁界を印加し、その磁界の方向を電流方向Yに対して回転(θ)させます。 この時の抵抗変化と、磁化の変化をイメージ的に図4に示します。飽和感度領域で外部磁界を回転すると、磁化の方向が、外部磁界の方向と同じ方向で回転します。
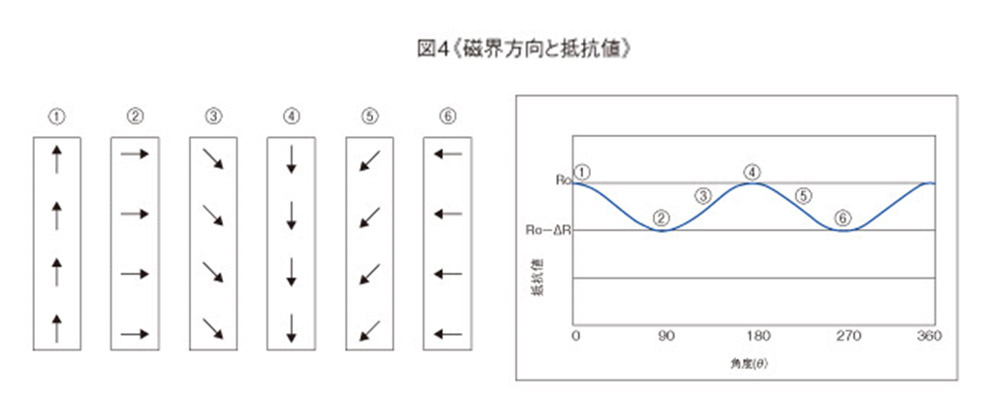
抵抗値変化量(ΔR)は、電流方向と磁界の方向が垂直(θ=90°②,270°⑥)の時に最大となり、電流方向と磁界の方向が平行(θ=0°①,180°④)の時に最小となります。AMRセンサの抵抗値は、電流方向と磁界方向の成す角度(θ)の関数として表す事ができます。
R=R0-∆Rsin2 θ…(2)
R0:無磁界中の強磁性薄膜金属の抵抗値
∆R:抵抗変化率
θ:電流方向と磁界方向の成す角度
飽和感度領域で一定の磁界強度以上であれば、ΔRは定数になり、磁界の強弱には影響されないことになります。
先に説明した、一定方向の磁界の強弱を検出する原理を利用したタイプと、飽和感度領域で一定の磁界強度以上で磁界の方向を検出する原理を利用したタイプでは、強磁性薄膜金属の形状が異なります。当社では、前者の形状を【すだれタイプ】、後者を【垂直タイプ】と呼び2種類の検出タイプを用意しています。
関連キーワードからセンサを探す
 お問い合わせ
お問い合わせ