 AMRセンサ
AMRセンサ
飽和感度領域に達する磁界強度で、磁界の方向を検出する原理を利用したAMRセンサの強磁性薄膜金属の形状を、図17に示します。横方向に形成された強磁性薄膜金属エレメント(R1)と縦方向のエレメント(R2)が直列に結線した形状になります。この配置を垂直タイプと呼びます。
水平方向(X方向)の磁界が印加された場合、エレメント(R1)は最大の抵抗値を示し、エレメント(R2)は最小の抵抗値を示します。図17のように飽和感度領域に達する磁界強度を印加し、その磁界の方向をYに対して角度変化θを与えた場合、抵抗値R1とR2は次式で与えられます。
R1=R0-∆Rsin2 θ…(4)
R2=R0-∆Rcos2 θ…(5)
このAMRセンサの等価回路(ハーフブリッジ)を図18に示します。
出力Voutは次式で与えられます。

(6)式に(4)、(5)式を代入し整理すると
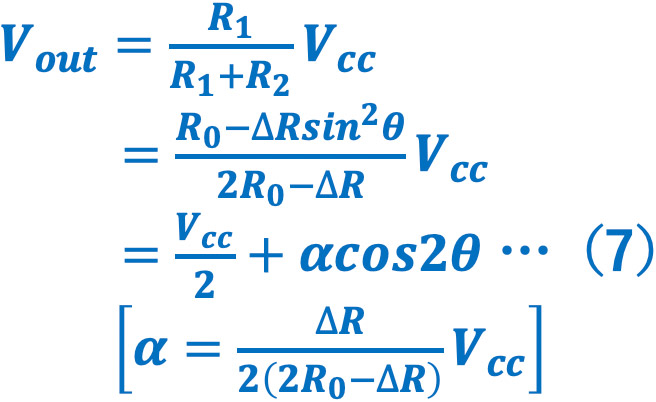
(7)式が成立します。
図19のようにエレメントを形成すれば一般的に知られているホイートストン・ブリッジの構成となります。
次に磁石が運動(図20:回転運動、図21:直線運動)するときの磁界方向の変化と、AMRセンサの出力について説明します。図20、図21とも、AMRセンサを、飽和感度領域に達する磁界強度が印加されるギャップ(磁石とAMRセンサとの距離)で、かつセンサ面に対し、磁界の方向が変化するように配置します。図20の場合は磁石が1回転した時、センサ面では磁界の方向が1回転します。よって出力波形は、式(7)Vout=Vcc/2+αcos2θより2周期の波形が得られます。図21の場合は、磁石が距離λを移動した時、センサ面では磁界の方向が1/2回転となり出力波形は1周期の波形が得られる事になります。
さらに、運動方向の情報を得る為には、図21で示すaとb若しくはaとdの位置に、2つの垂直タイプAMRセンサを配置し、2出力を得れば良い事になります。あるいは、図22のように2つの垂直タイプAMRセンサを用い、一方のセンサを45°傾け、それらを重ねて配置する方法もあります。この配置は、任意の着磁ピッチλに対して常に1/4周期(90°)の位相差を持った2出力を得ることができる利点があります。
しかしながら2つのセンサの配置には、機械的位置合わせと、センサの個体差(特性)という問題点があります。これらの問題を解消するAMRセンサを図23で示します。2組のフルブリッジ構成のエレメントを互いに45°傾け、1つの基板上に形成します。これにより問題は解消され1つのAMRセンサで精度の良い正弦波、余弦波の2出力が可能となります。
また、図24のようにセンサのエレメントの延伸方向に対して45°にバイアス磁界を掛けることがあります。この時、周期は半減されホール素子と同様に極(N、S)の判別が可能となります。バイアス磁石の磁界強度は、飽和感度領域に入る強度と同程度の強度が理想的です。
関連キーワードからセンサを探す
 お問い合わせ
お問い合わせ